realisierte Greifersysteme
Referenz‑Showcase Kunststoff Elektro Automotive
Greifertechnik
Greifersysteme (EOAT) für Industrieroboter – präzises Einlegen, Entnehmen und Montieren. Passgenau für Kunststoff, Elektro und Automotive.
- Prozessoptimiert
- Taktzeiten
- Schnellwechselsysteme
- Rüstfreundlich
- Modernste Technik
- Innovativ

Robotergreifer & EOAT: Wenn jeder Griff sitzen muss
Wir konstruieren und bauen Robotergreifer (End‑of‑Arm‑Tooling) exakt nach Bauteil und Prozess – vom einfachen Entnehmen bis zur qualitätsgesicherten Montage. Inklusive Sensorik, Dokumentation und Integration.
Für alle Freiheitsgrade, egal wie viele Achsen
Für jede Oberfläche das richtige Material
Rüstfreundlich: Schnelle Wechsel durch Wechselsätze und universelle Schnittstellen
Qualität: Abfragen, Leckage‑Monitoring, Kraft/Weg, Traceability
Warum AfiPro für Ihre Greifertechnik?
Automatisierung mit Greifertechnik – schneller in die Serie, sicher im Prozess.
Branchen abgedeckt
Jahre Erfahrung
Neutral beraten, passgenau liefern, sauber dokumentieren.
Greiferlösungen für Ihre Anwendung
Mechanisches Greifen, Greifen mit Vakuum oder Speziallösungen. Maßgeschneiderte EOAT-Lösungen mit vollständiger sensorischer Überwachung für eine perfekte Handhabung.

Mechanische Greifer
Individuelle Greifbacken, definierte Greifkräfte, oberflächenschonend und hohe Wiederholgenauigkeit durch präzise und spielfreie Führungen.
- Parallelgreifer
- Schwenkgreifer
- Nadelgreifer
- Optional mit Weg und Kraftabfrage

Vakuumgreifer
Flächiges Greifen mit exakt abbildenden Konturstücken. Sanftes Aufnehmen mit Vakuum für empfindliche Oberflächen oder brüchige Bauteile.
- Sauggreifer
- Flächengreifer
- Bernoulli-Greifer
- Kontrolle über Vakuumaufbau

Speziallösungen
Für alle Anwendungen, die nicht dem üblichen entsprechen.
- Magnetisches Greifen
- Schlingengreifer
- Kegelgreifer
- Speziell abgestimmt auf Anwendungsfall
EOAT-Systeme

- Leichtbauweise zur Nutzlast- und Dynamikoptimierung
- Umgebungen: ESD, Reinraum, Temperatur und IP‑Schutz nach Bedarf
- Perfekt angepasst an zu handhabende Teile
- Anbindung über Schnellkupplung für kurze Rüstzeiten
Handhabungstechnik
Präzise Materialhandhabung vom Zuführen bis zur Übergabe – wiederholgenau, bauteilschonend und prozesssicher.
Zuführen, Vereinzeln, Positionieren und Übergaben
Zentrier‑, Klemm‑ und Anschlageinheiten
Oberflächenschutz und Greifspuren‑Vermeidung
Taktzeit‑optimierte Bewegungsprofile
Prüf‑ und Abfragekonzepte für Qualität und Vollständigkeit
Planen Sie ein Greifer‑Projekt? Lassen Sie uns Ihre Anforderungen besprechen.
Implementierungsbeispiele
Referenzprojekt
Einlege- und Entnahme für IMD-Anlage
- Aufnahme der Label und der Fertigteile mit Vakuum
- Zwei Kavitäten
- Einlegen und Entnehmen an beweglicher Seite
- Durchmesser 137mm
- Pro Kavität ein Label seitlich und eins am Boden
- Hochspannungsaufladung für optimalen Halt im Werkzeug

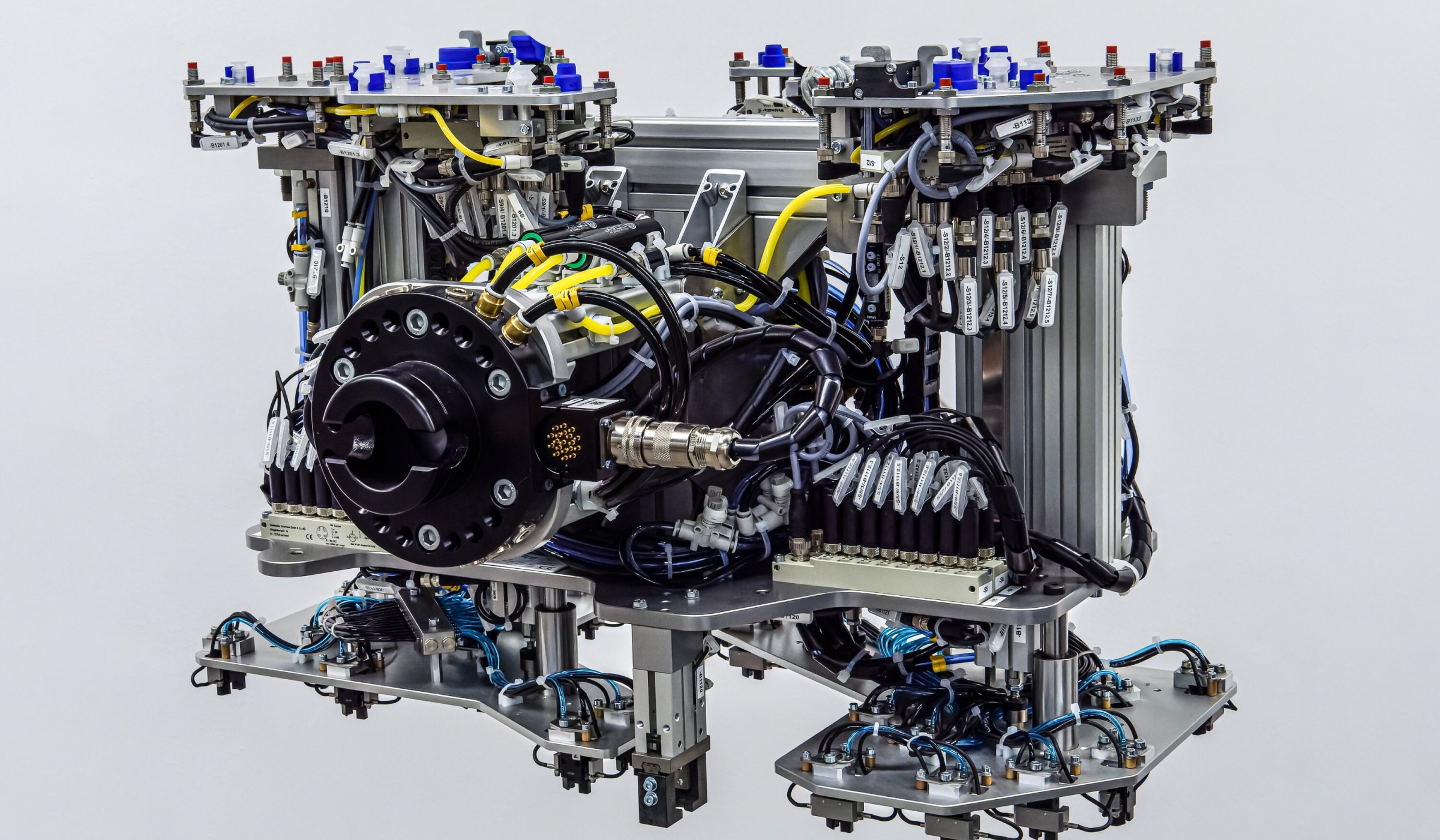
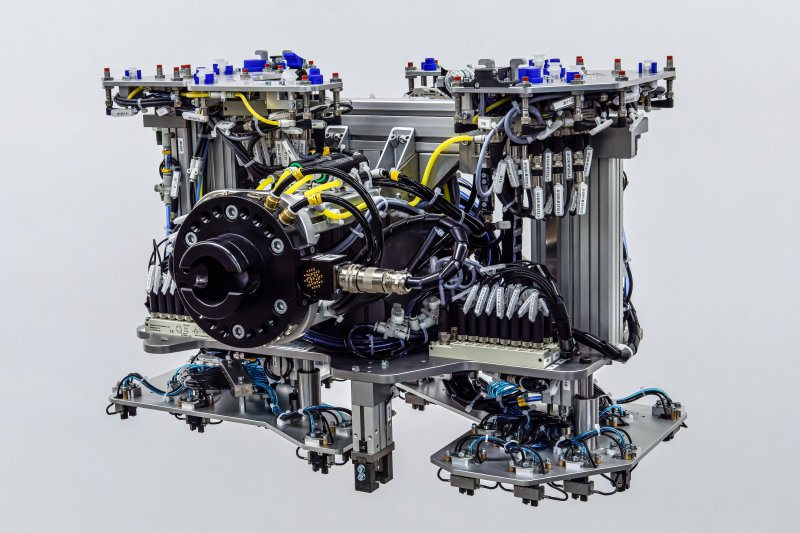
Referenzprojekt
Montage und Umsetzgreifer
- Greifer nimmt zwei Hälften eines Kunststoffteils auf
- Legt in eins der Teile einen Stahlbügel und vier Sichtgläser ein
- Beide Hälften werden übereinander in Schweißanlage platziert, Einlegeteile befinden sich zwischen ihnen
- Nach Schweißvorgang sind beide miteinander verschweißt, werden mit dem Greifer entnommen
- Im gleichen Zug werden die nächsten Teile in Schweißanlage platziert
- Teilegröße: 900x1000mm

Referenzprojekt
Einlege- und Entnahme für IMD-Anlage
- Aufnahme der Label und der Fertigteile mit Vakuum
- Eine Kavität
- Einlegen in bewegliche Seite, Entnahme aus fester Seite
- Es werden 6 Label gleichzeitig in Kavität eingelegt
- Hochspannungsaufladung für optimalen Halt im Werkzeug

Technische Daten & Kompatibilität

Kompatibel, integrationsbereit, individuell anpassbar
- Robotermarken: ABB, KUKA, FANUC, Yaskawa, UR u. a.
- Flanschgrößen nach ISO 9409‑1
- Druckluft- und Vakuumversorgung über Roboter oder greiferinterne Ventilinsel
- Kommunikation über IO-Link
- Sichere Medienführung durch Energieketten und Rückzugsysteme
Einkauf & Dokumentation
Lieferumfang: vormontierte EOAT, Stückliste, Einstellwerte
Dokumente: Zeichnungen, Pneumatik‑/Vakuumpläne, Prüfdokumente
Optionen: CE‑Unterlagen, DQ/IQ/OQ, Werksabnahme
Services: Schulung, Ersatzteile, Änderungsservice
Häufig gestellte Fragen
Welche Informationen genau für ein verbindliches Angebot benötigt werden, kommen am besten in einem unverbindlichen Erstgespräch zum Vorschein. Da unsere Lösungen maßgeschneidert sind, variieren die Anforderungen je nach Anwendung, Einsatzort und Ihren Zielen.
u. a. Yaskawa, ABB, KUKA, FANUC, Epson, RobCo, Doosan, Universal Robots. Weitere auf Anfrage.
Abhängig von Komplexität und Materialverfügbarkeit. Nach Klärung erhalten Sie einen belastbaren Terminplan.
Für Gesamtanlagen liefern wir die komplette CE-Dokumentation. Wenn wir als Systemlieferant für eine größere Gesamtanlage auftreten, erhalten Sie von uns eine CE-Konformitätserklärung.
Kontakt aufnehmen
Greifer‑Sonderanfertigung oder Roboterintegration geplant? Sprechen Sie mit uns. Laden Sie gern Zeichnungen/STEP hoch.